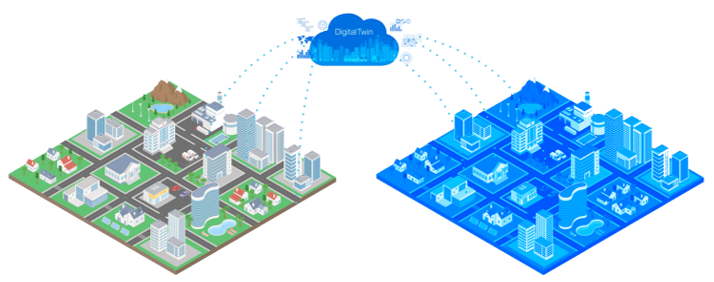
Digital Twin
The Digital Twin is a digital replica of the physical entity in the real world, which leverages big data and cloud/edge computing to benefit the mobility system consisting of human, vehicle, and traffic.
Assistant Professor
Purdue University, College of Engineering
mail ziran at purdue dot eduDr. Ziran Wang is an Assistant Professor in the Lyles School of Civil and Construction Engineering and Elmore Family School of Electrical and Computer Engineering (by courtesy) at Purdue University. He also serves as Assistant Director for Purdue University Institute for Control, Optimization and Networks (ICON).
He leads the Purdue Digital Twin Lab (we are hiring) to build digital replicas of real-world entities based on AI, big data, edge/cloud computing, and mixed reality, with particular applications in autonomous vehicles and intelligent transportation systems.
Dr. Wang was a Principal Researcher at Toyota Motor North America R&D - InfoTech Labs,
where he led the Digital Twin Roadmap.
He received the Ph.D. degree from the University of California, Riverside
under the supervision of Dr. Matthew J. Barth.
His Ph.D. dissertation is "Developing Agent-Based Distributed
Cooperative Vehicle-Infrastructure Systems in the Connected and Automated Vehicle Environment".
Dr. Wang is an author of 80+ refereed papers and 50+ patent applications in the fields of autonomous driving, digital twin, human-autonomy teaming, and intelligent vehicles. His research achievements have been demonstrated at the
Consumer Electronics Show (CES),
and acknowledged by the National Center for Sustainable Transportation Dissertation Award
issued by the U.S. Department of Transportation, the SAE Vincent Bendix Automotive Electronics Engineering Award
(i.e., best paper in 2019),
the SAE Arch T. Colwell Merit Award
(i.e., best paper in 2021), and five other best paper awards.

The Digital Twin is a digital replica of the physical entity in the real world, which leverages big data and cloud/edge computing to benefit the mobility system consisting of human, vehicle, and traffic.
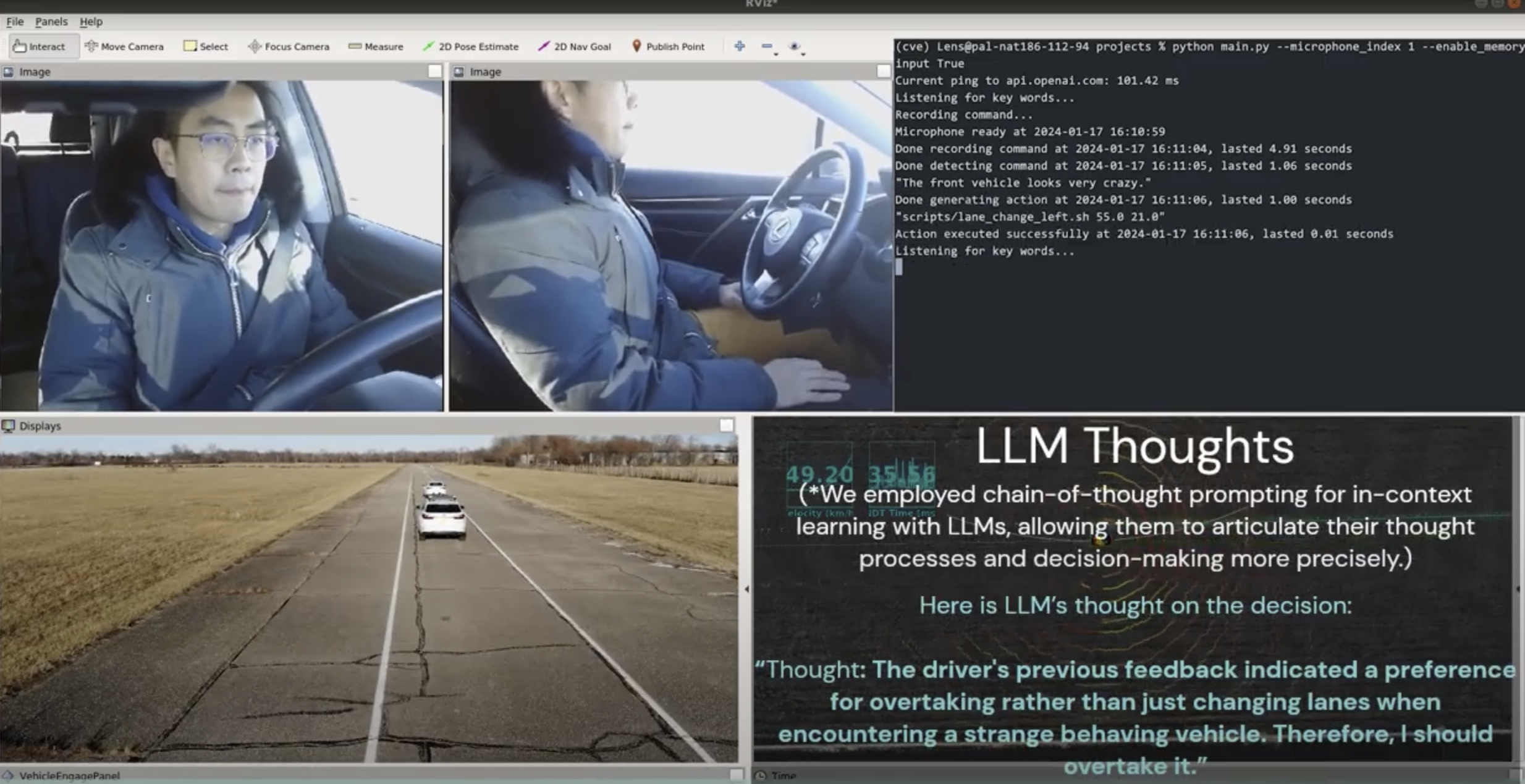
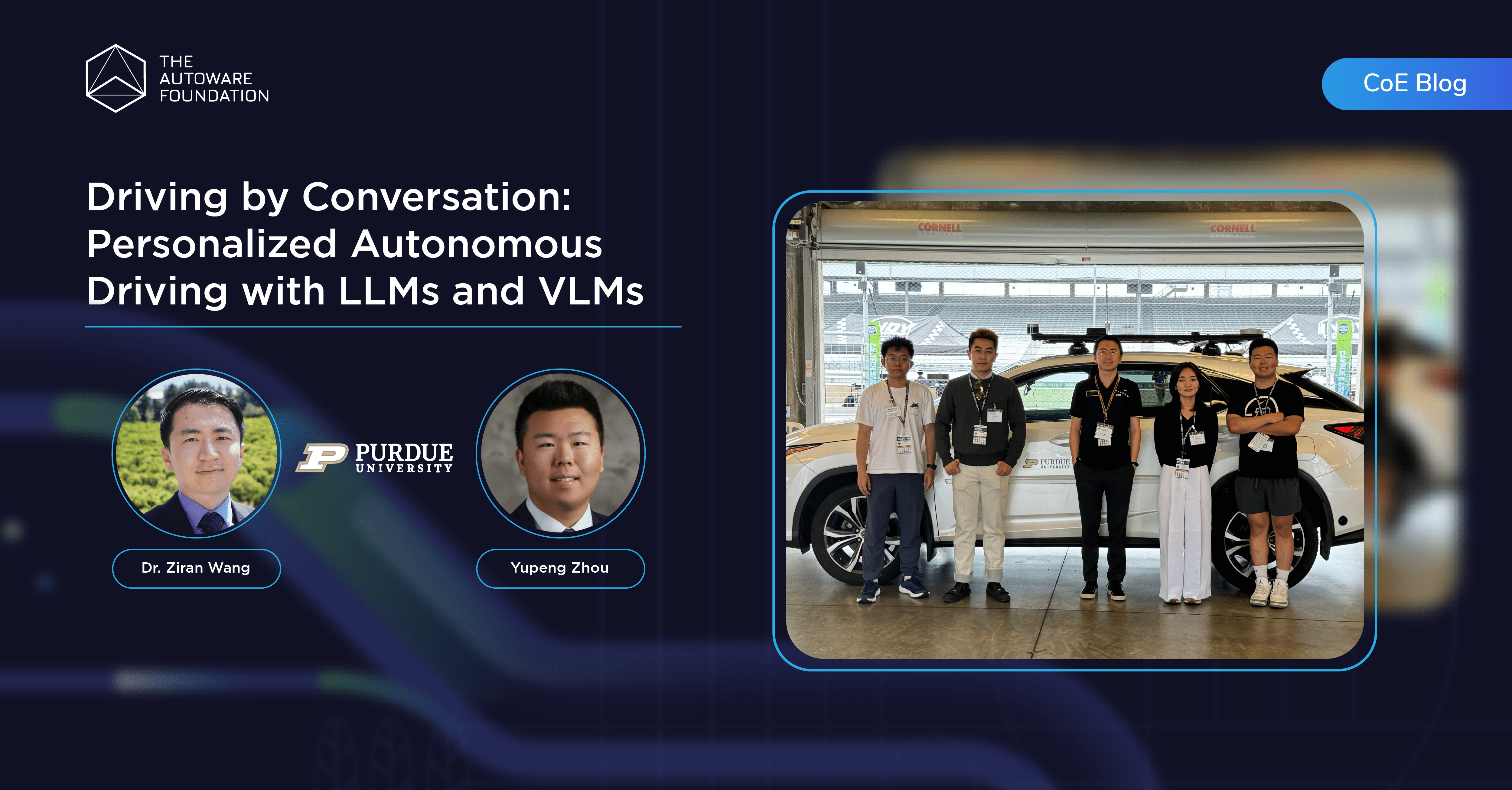
Large language and vision models (LLVMs) can help autonomous vehicles understand the underlying logics of human commands and traffic scenes to facilitate human-autonomy teaming.

Personalized driver behavior (or more generally human factor) plays a crucial role in human-autonomy teaming, especially when the driver is operating Advanced Driver Assistance Systems (ADAS).

Driving simulator allows human to drive vehicles modeled in a virtual environment, enabling comparison between proposed connected and automated vehicle technology with human driving behaviors.
 Aug. 14, 2025
Aug. 14, 2025 Jun. 22, 2025
Jun. 22, 2025 Jun. 21, 2025
Jun. 21, 2025 May 15, 2025
May 15, 2025 May 1, 2025
May 1, 2025 Apr. 24, 2025
Apr. 24, 2025 Apr. 10, 2025
Apr. 10, 2025