Dec. 16, 2019
I will be serving as the session organizer for 2020 Intelligent Vehicles Symposium, Internet of Things in Intelligent Transportation Systems: Opportunities and Challenges Workshop, held in Las Vegas, Nevada on Jun. 23, 2020.
I will be serving as the session organizer for 2020 Intelligent Vehicles Symposium, Internet of Things in Intelligent Transportation Systems: Opportunities and Challenges Workshop, held in Las Vegas, Nevada on Jun. 23, 2020.
I will be serving as the session organizer for 4th IEEE Conference on Control Technology and Applications, Automated Controls Invited Sessions, held in Montreal, Canada during Aug. 24-26, 2020. Please consider to submit your paper today.

Our four papers "Driver Behavior Modeling using Game Engine: A Learning-Based Approach", "Cooperative Ramp Merging with Vehicle-to-Cloud Communications: A Field Experiment", "End-to-End Vision-Based Adaptive Cruise Control (ACC) Using Deep Reinforcement Learning", and "Early Findings from Field Trials of 'Eco-Drive' for Heavy-Duty Trucks" were accepted by Transportation Research Board (TRB) 99th Annual Meeting at Washington DC, Jan. 12-16, 2020.
We visited University of California, Riverside for the annual review meeting of the ongoing "Digital Twin" project. A real-world demo of cooperative on-ramp merging was shown to all the visitors, including Akio Orii, Vice President of Toyota Motor North America.





Our UCR team's previous Eco-Drive demonstration with Volvo Group North America, conducted in Carson, CA on Mar. 7, got featured on Tech Xplore's front page.

Our paper "A Survey on Cooperative Longitudinal Motion Control of Multiple Connected and Automated Vehicles" was directly accepted by IEEE Intelligent Transportation Systems Magazine.

Professor Qi Zhu from Northwestern University visited Toyota Motor North America, InfoTech Labs.

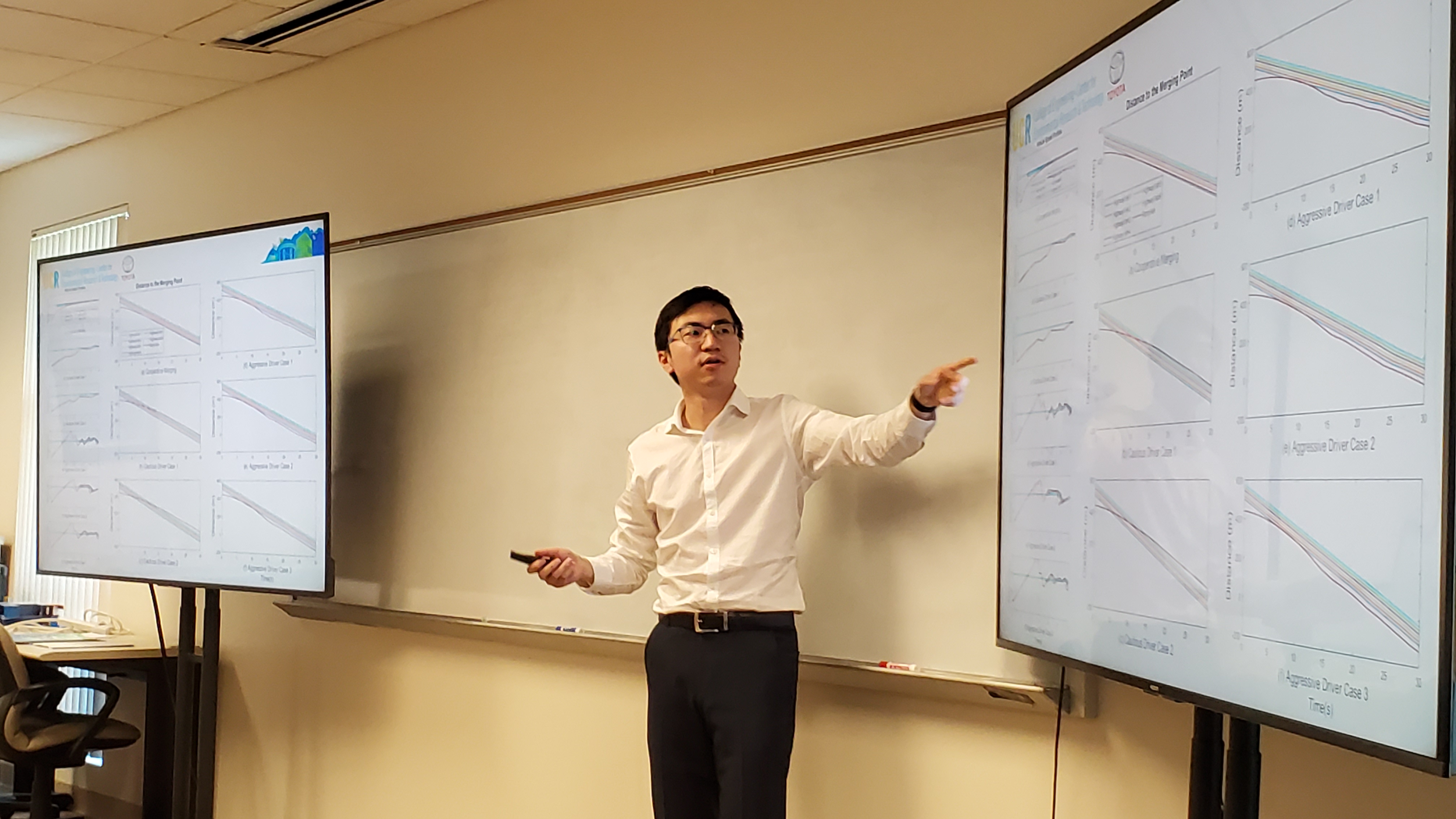
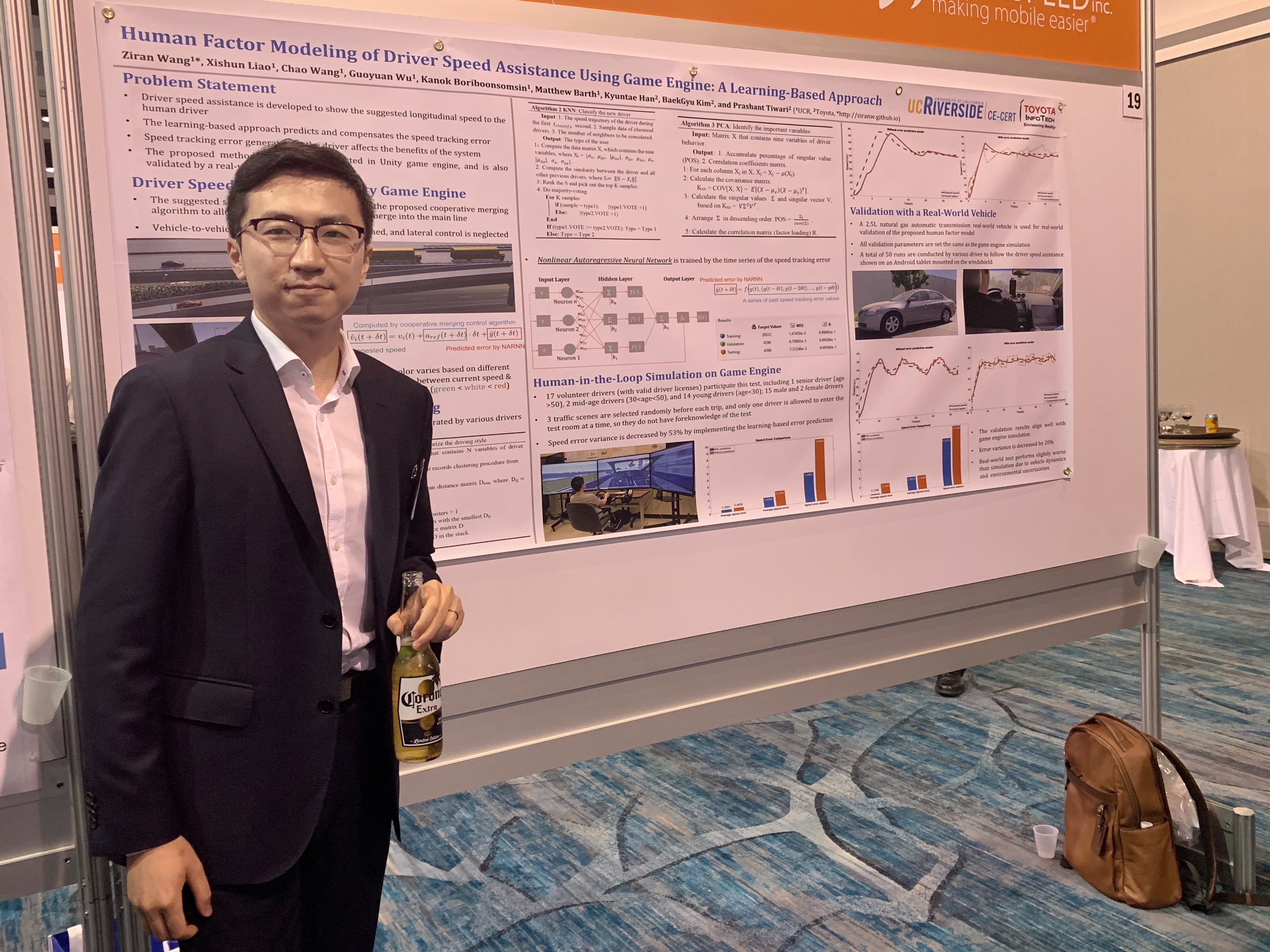
I was invited to a special session and a panel discussion to present our work "Unity3D-Based AV Simulation with V2X Communication and Human-in-the-loop Integration". I also presented our poster "Human Factor Modeling of Driver Speed Assistance Using Game Engine: A Learning-Based Approach".





I attended 2019 American Control Conference and presented our paper "Lookup Table-Based Consensus Algorithm for Real-Time Longitudinal Motion Control of Connected and Automated Vehicles".


Our recent research progress regarding cooperative highway on-ramp merging and game engine simulation got featured in UCR News.



Our papers "Recent Field Implementation Results of a Heavy-Duty Truck Connected Eco-Driving System" and "The State-of-the-Art of Coordinated Ramp Control with Mixed Traffic Conditions" were accepted by IEEE The 22nd IEEE International Conference on Intelligent Transportation Systems (ITSC).
After 3 years 8 months and 8 days of graduate study, I was finally awarded the Ph.D. degree!




I conducted the final defense of my Ph.D. degree with a title "Developing agent-based distributed cooperative vehicle-infrastructure systems in the connected and automated vehicle environment".



Our paper "Cooperative Ramp Merging System: Agent-Based Modeling and Simulation using Game Engine" was accepted by SAE International Journal of Connected and Automated Vehicles.
Our paper "Cooperative Eco-Driving at Signalized Intersections in a Partially Connected and Automated Vehicle Environment" was accepted by IEEE Transactions on Intelligent Transportation Systems.

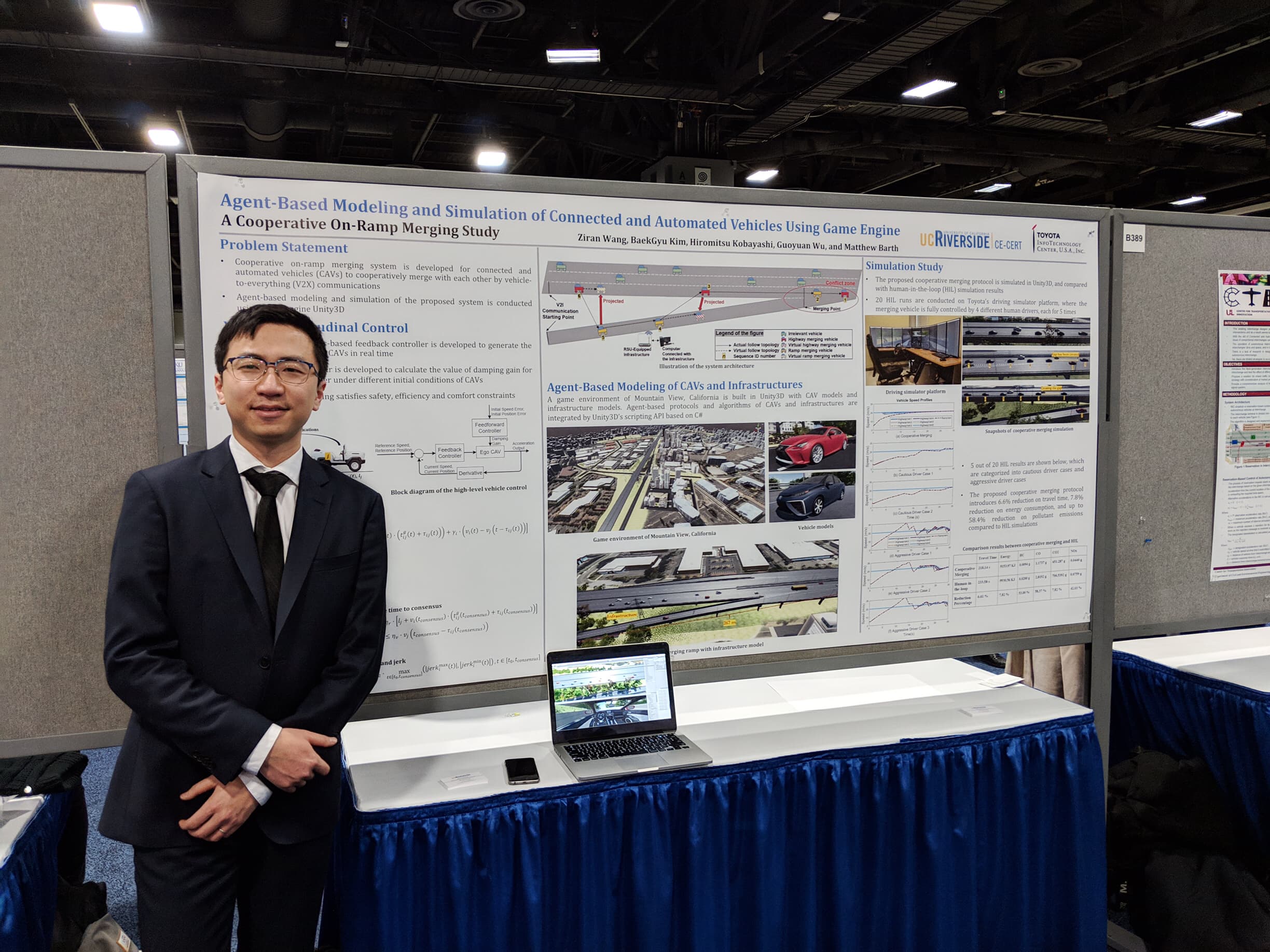
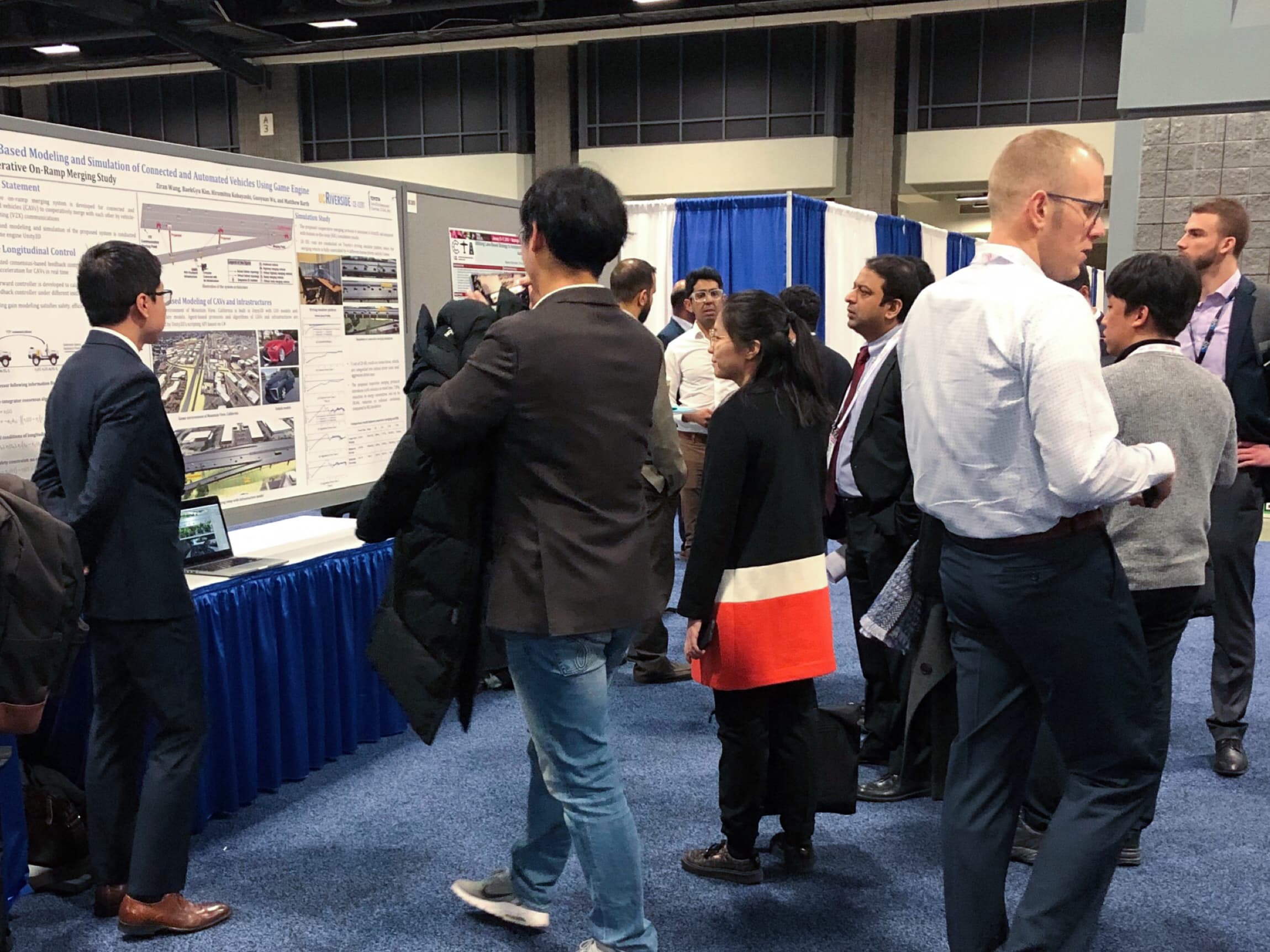
We attended National Center for Sustainable Transportation (NCST) Leadership Council Meeting at University of California, Davis. I was invited to present my work "Agent-Based Modeling and Simulation of Connected and Automated Vehicles Using Game Engine" at the poster session.


We conducted the Eco-Drive demonstration of the Volvo/Eco-FRATIS project at Carson. Guests from LA Port, LA Metro, City of Carson and other agencies took test rides on our Volvo truck, TTSI truck and a bus provided by City of Carson.




Our paper "Lookup Table-Based Consensus Algorithm for Real-Time Longitudinal Motion Control of Connected and Automated Vehicles" was accepted by 2019 American Control Conference, to be held in Philadelphia, PA on Jul. 10-12, 2019.

We visited United States Department of Transportation Federal Highway Administration (FHWA) Turner-Fairbank Highway Research Center. We took a ride at one of FHWA's vehicles equipped with Cooperative Automation Research Mobility Applications (CARMA), where one of their applications is built based on our eco-approach and departure algorithm.


We attended Transportation Research Board 98th Annual Meeting with other 14000 attendees. I presented our work "Agent-Based Modeling and Simulation of Connected and Automated Vehicles Using Game Engine" both at AHB20 Freeway Operations Committee Meeting and at the poster session.