Connected Eco-Driving for Heavy-Duty Conventional and Plug-In Hybrid Electric Trucks
Timeframe: Sep. 2017 - Mar 2019
Sponsor: South Coast Air Quality Management District
Team: University of California, Riverside & Volvo Group North America.
We develop the connected eco-driving algorithms and other supporting tools for both conventional trucks and PHEV trucks.
The algorithms will use signal phase and timing (SPaT) information from the traffic signals on the truck route along with
the information about the current position of the vehicle, the distance from the upcoming intersection, and if applicable,
the distance from the preceding vehicle to determine the best course of action for passing through the intersections.
Traffic Optimization for Signalized Corridors (TOSCo)
Timeframe: Apr. 2015 - Jun. 2019
Sponsor: U.S. Department of Transportation, Federal Highway Administration (FHWA)
Team: University of California, Riverside & University of Michigan Transportation Institute (UMTRI) & Texax A&M Transportation Institute (TTI) & IAV GmbH,
Crash Avoidance Metrics Partners LLC (CAMP) Vehicle-to-Infrastructure (V2I) Consortium (consists of Fiat Chrysler, Ford, General Motors, Honda, Hyundai-Kia, Mazda, Nissan, Subaru, VW/Audi, and Volvo).
We develop the connected eco-driving algorithms and other supporting tools for both conventional trucks and PHEV trucks. The algorithms will use signal phase and timing (SPaT) information from the
traffic signals on the truck route along with the information about the current position of the vehicle, the distance from the upcoming intersection, and if applicable, the distance from the preceding
vehicle to determine the best course of action for passing through the intersections.
Development of Eco-Friendly Ramp Control Based on Connected and Automated Vehicle Technology
Timeframe: Oct. 2018 - Sep. 2019
Sponsor: United States Department of Transportation, National Center for Sustainable Transportation
Team: University of California, Riverside
We develop a hierarchical ramp merging control strategy to reduce overall freeway congestion, and evaluate the mobility
and environmental impacts of the proposed strategy by PTV VISSIM.
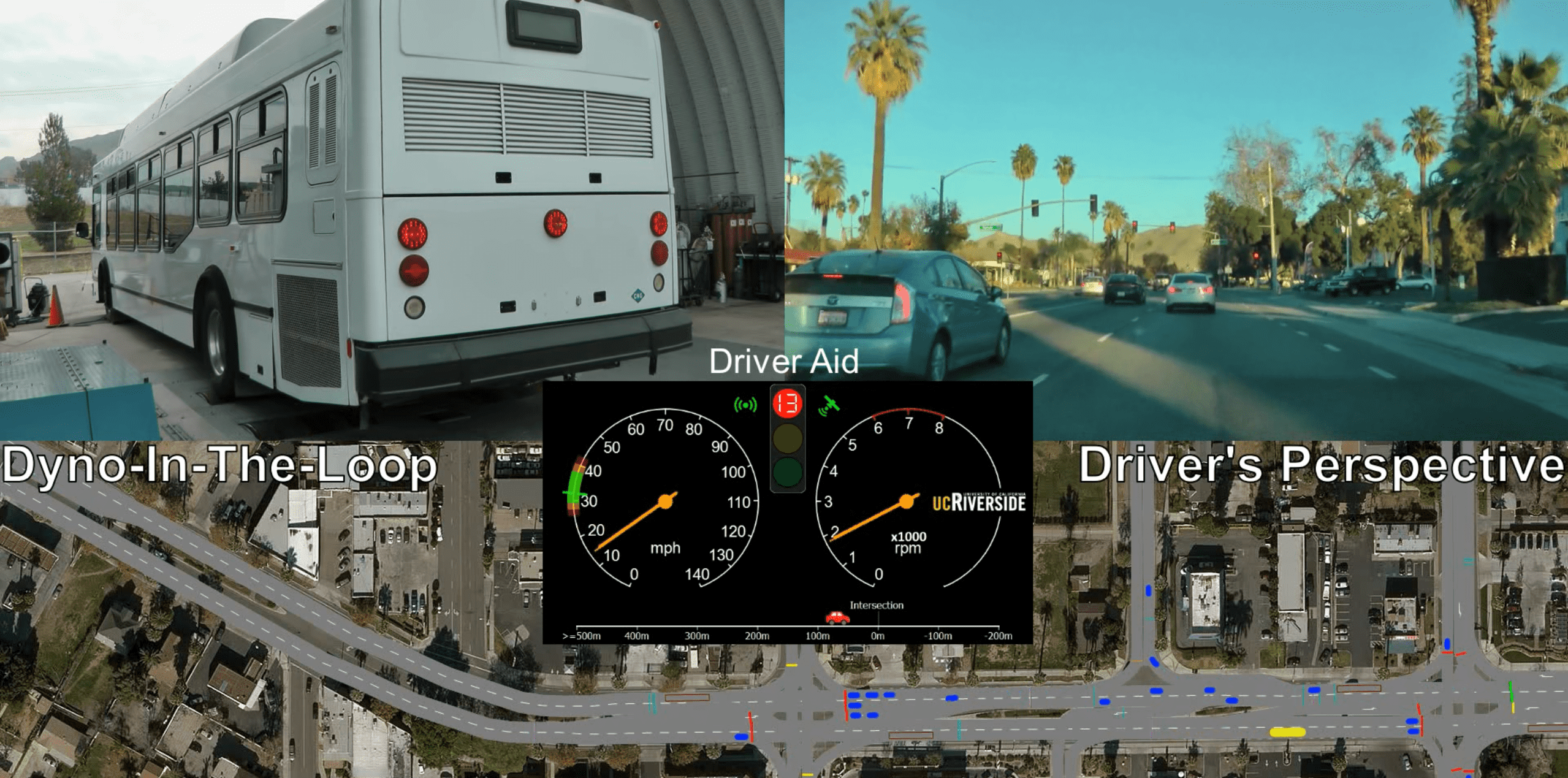
An Innovative Vehicle-Powertrain Eco-Operation System for Efficient Plug-In Hybrid Electric Buses
Timeframe: Jan. 2017 - Dec. 2019
Sponsor: U.S. Department of Energy, Advanced Research Projects Agency-Energy (ARPA-E) NEXTCAR program
Team: University of California, Riverside, Oak Ridge National Laboratory, US Hybrid.
We design, develop, and test an innovative vehicle-powertrain eco-operation system for natural-gas-fueled plug-in hybrid electric buses. Since stop-and-go operation wastes a large amount of energy, we will adopt Eco-Approach and Departure at traffic signals, together with efficient adaptive cruise, and optimized stopping and accelerating from stop signs and bus stops. Optimizing these maneuvers for an urban transit bus presents significant opportunities for improving energy efficiency. Additionally, we will use look-ahead information on traffic and road grade to optimize the powertrain operation by managing combustion engine output, electric motor output and battery state of charge in this hybrid application.